1. 几何基础
1.1 点到直线的投影(垂足$\mathbf{P_F}$)
由于垂足在直线(经过点$\mathbf{P_0}$方向为$\mathbf{v}$)上,所以:
\[ \mathbf{P_F}=\mathbf{P_0}+\lambda\mathbf{v}\]
又由于垂直,则有:
\[ \begin{cases}
\mathbf{P_F}=\mathbf{P_0}+\lambda\mathbf{v}\\
(\mathbf{P_F-P_A})\cdot\mathbf{v}=0
\end{cases} \]
解得,
\[ \lambda=\frac{\mathbf{v}\cdot(\mathbf{P_A-P_0})}{||\mathbf{v}||^2} \]
所以(注意数量积的计算顺序),
\[
\begin{cases}
\mathbf{P_F}=\mathbf{P_0}+\lambda\mathbf{v}\\
(\mathbf{P_F-P_A})\cdot\mathbf{v}=0
\end{cases}
\]
解得,
\[
\lambda=\frac{\mathbf{v}\cdot(\mathbf{P_A-P_0})}{||\mathbf{v}||^2}
\]
所以(注意数量积的计算顺序),
\[
\mathbf{P_F}=\mathbf{P_0}+\mathbf{v}*\frac{\mathbf{v}\cdot(\mathbf{P_A-P_0})}{||\mathbf{v}||^2}
\]
- $*$:表示数乘,一般标量在前,矢量在后,但标量较复杂时也会反过来写
- $\cdot$:表示向量内积
- $\mathbf{v}^2$:表示内积的平方
- $v^2$:表示数量积的平方
- 下同
1.2 关于直线的对称点$\mathbf{P_S}$
利用上面点到直线投影的结论,可得推算出$\mathbf{P_A}$关于直线的对称点$\mathbf{P_S}$为:
\[
\begin{aligned}
\mathbf{P_S}=&\mathbf{P_A}+2(\mathbf{P_F}-\mathbf{P_A})\\
=&2\mathbf{P_F}-\mathbf{P_A}\\
=&2\mathbf{P_0}+2\mathbf{v}*\frac{\mathbf{v}\cdot(\mathbf{P_A-P_0})}{||\mathbf{v}||^2}-\mathbf{P_A}
\end{aligned}
\]
Mathematica 函数
(*关于直线的对称点*)
fViewSymmetricPoint[pointView_, linePoint1_, linePoint2_] := Module[{
pA = pointView,
p0 = linePoint1,
v = linePoint2 - linePoint1
},
2 p0 + 2 v (v.(pA - p0)/v.v) - pA
];1.3 射线与平面的交点$\mathbf{Q}$
由于交点在射线($\mathbf{P_A P_B}$)上,所以:
\[
\begin{aligned}
\mathbf{Q}=&\mathbf{P_A}+\lambda(\mathbf{P_B-P_A})\\
\lambda>&0
\end{aligned}
\]
由于交点在平面(过点$\mathbf{P_0}$,法向为$\mathbf{v}$)上,所以:
\[
(\mathbf{Q}-\mathbf{P_0})\cdot\mathbf{v}=0
\]
综上,
\[
\lambda=\frac{\mathbf{v}\cdot(\mathbf{P_0}-\mathbf{P_A})}{\mathbf{v}\cdot(\mathbf{P_B}-\mathbf{P_A})}
\]
当$\lambda<0$时,交点为射线的反向延长线与平面的交点
\[
\mathbf{Q}=\mathbf{P_A}+(\mathbf{P_B}-\mathbf{P_A})\frac{\mathbf{v}\cdot(\mathbf{P_0}-\mathbf{P_A})}{\mathbf{v}\cdot(\mathbf{P_B}-\mathbf{P_A})}
\]
Mathematica 函数
(*射线与平面的交点*)
fRayPlane[rayPointA_, rayPointB_, planePoint_,
planeNormalDirection_] := Module[{
pA = rayPointA,
pB = rayPointB,
p0 = planePoint,
v = planeNormalDirection,
k
},
k = v.(p0 - pA)/v.(pB - pA);
If[k > 0,
pA + k (pB - pA),
None]
];1.4 线段与球面的交点$\mathbf{Q}$
由于点$\mathbf{Q}$在半径为$R$球心为$\mathbf{C}$的球面上,所以:
\[
(\mathbf{Q-C})^2=R^2
\]
又由于点$\mathbf{Q}$在以$\mathbf{P_1}$(圆内)和$\mathbf{P_2}$(圆外)为端点的线段上,所以:
\[
\begin{aligned}
\mathbf{Q}=&\mathbf{P_1}+\lambda(\mathbf{P_2-P_1})\\
\lambda\in&[0,1]
\end{aligned}
\]
将线段方程代入球的方程:
\[[\mathbf{P_1}+\lambda(\mathbf{P_2-P_1})-\mathbf{C}]^2=R^2\]
\[(\mathbf{P_2-P_1})^2\lambda^2+2(\mathbf{P_2-p_1})\cdot(\mathbf{P_1}-\mathbf{C})\lambda+(\mathbf{P_1}-\mathbf{C})^2-R^2=0\]
根据一元二次方程求根公式,计算$\lambda$(注意数量积的计算顺序)
\[
\lambda=\frac{-(\mathbf{P_2-P_1})\cdot(\mathbf{P_1}-\mathbf{C})\pm\sqrt{[(\mathbf{P_2-P_1})\cdot(\mathbf{P_1}-\mathbf{C})]^2-(\mathbf{P_2-P_1})^2[(\mathbf{P_1}-\mathbf{C})^2-R^2]}}{(\mathbf{P_2-P_1})^2}
\]
由于,$\lambda<0$时,为$\mathbf{P_2}\mathbf{P_1}$延长线上的点,
所以要求的交点为:
\[
\mathbf{Q}=\mathbf{P_1}+(\mathbf{P_2-P_1})*\frac{-(\mathbf{P_2-P_1})\cdot(\mathbf{P_1}-\mathbf{C})+\sqrt{[(\mathbf{P_2-P_1})\cdot(\mathbf{P_1}-\mathbf{C})]^2-(\mathbf{P_2-P_1})^2[(\mathbf{P_1}-\mathbf{C})^2-R^2]}}{(\mathbf{P_2-P_1})^2}
\]
Mathematica 函数
(*射线与球的交点*)
fRaySphereItsc[pointInSphere_, pointView_, sphereCenter_,
sphereRadius_] := Module[{
p1 = pointInSphere,
p2 = pointView,
c = sphereCenter,
r = sphereRadius,
k, k1, k2},
k1 = -(p2 - p1).(p1 - c);
k2 = Sqrt[k1^2 - (p2 - p1).(p2 - p1) ((p1 - c).(p1 - c) - r^2)];
k = (k1 + k2)/(p2 - p1).(p2 - p1);
If[k2 \[Element] Reals && k > 0,
p1 + k (p2 - p1),
None]
];
1.5 旋转+平移变换(绕x轴旋转$\theta$后,沿$z$轴平移$d$)
\[
\left(
\begin{array}{cccc}
1 & 0 & 0 & 0 \\
0 & \cos (\theta ) & -\sin (\theta ) & 0 \\
0 & \sin (\theta ) & \cos (\theta ) & d \\
0 & 0 & 0 & 1 \\
\end{array}
\right)
\]
Mathematica 函数
(*从向量{x1,y1,z1}旋转到向量{x2,y2,z2}*)
RotationTransform[{{x1,y1,z1}, {x2,y2,z2}}]2. 怎样用 Mathematica 实现
2.1 基本思路
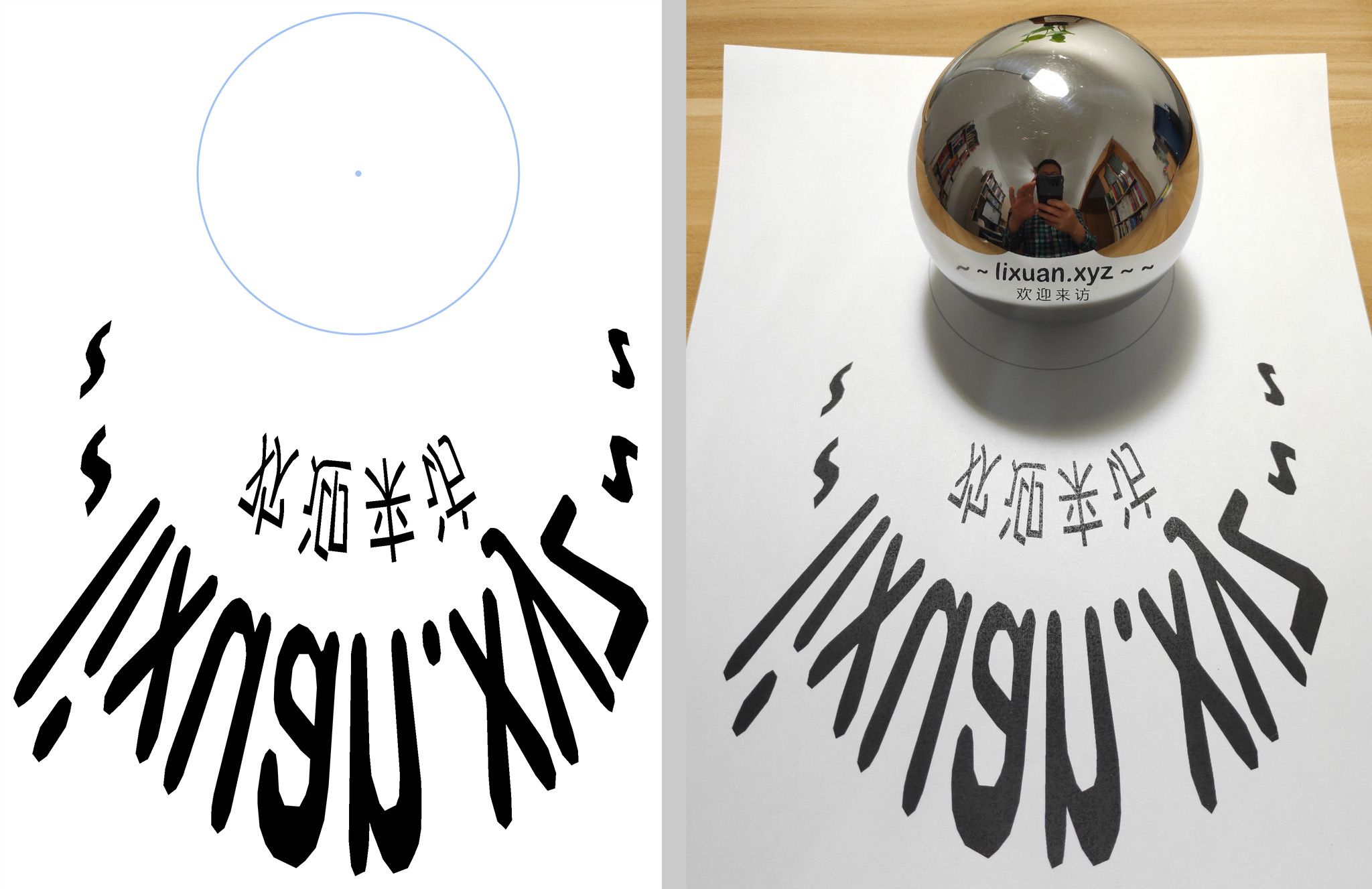
为简单起见,只考虑二值图像的球面反射成像。
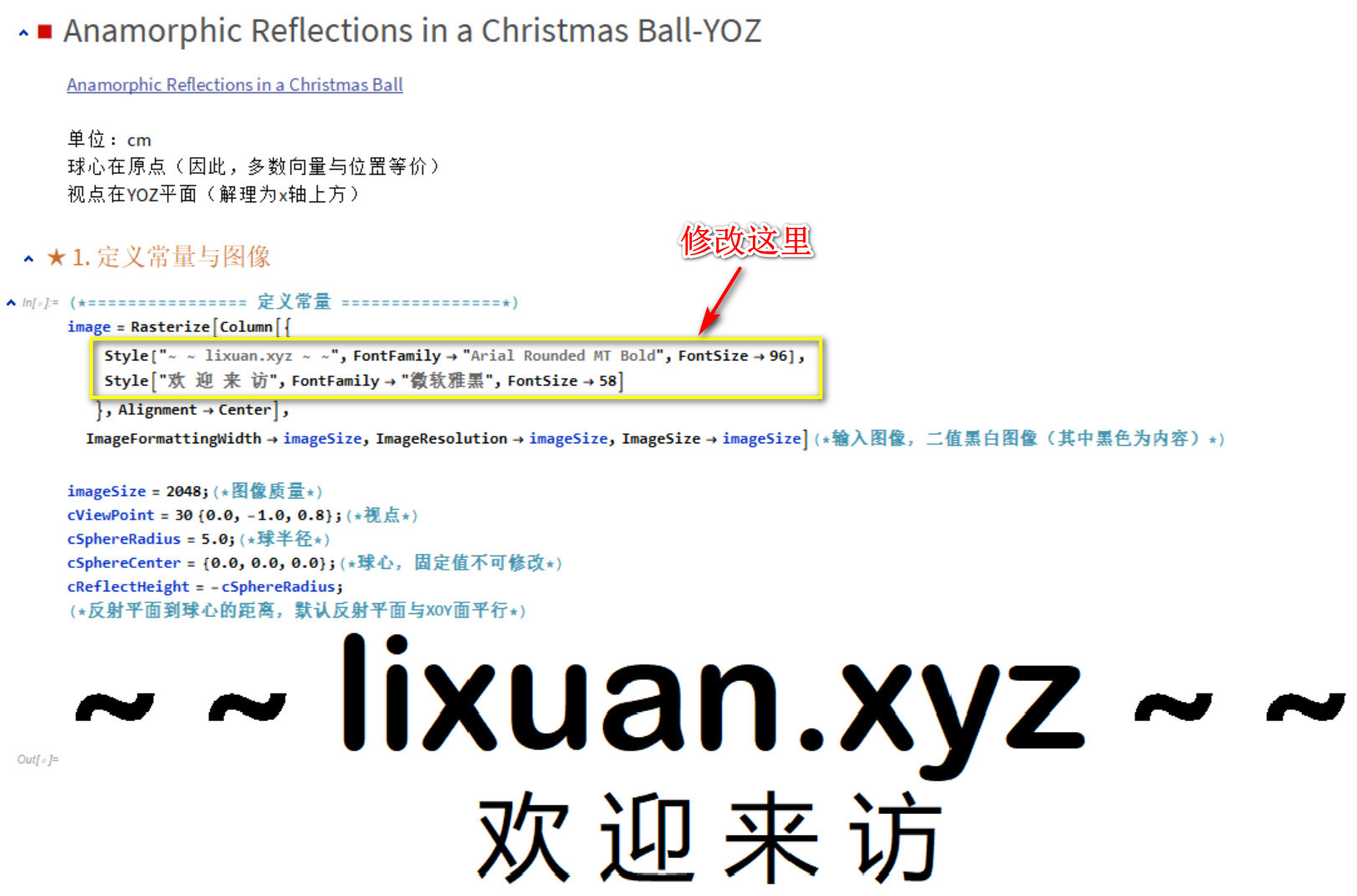
即便没有上面的几何知识,用Mathematica也可以非常方便的实现,详见文章——“Anamorphic Reflections in a Christmas Ball-YOZ”。
不过,使用上面的几何知识,可以让计算速度更快。
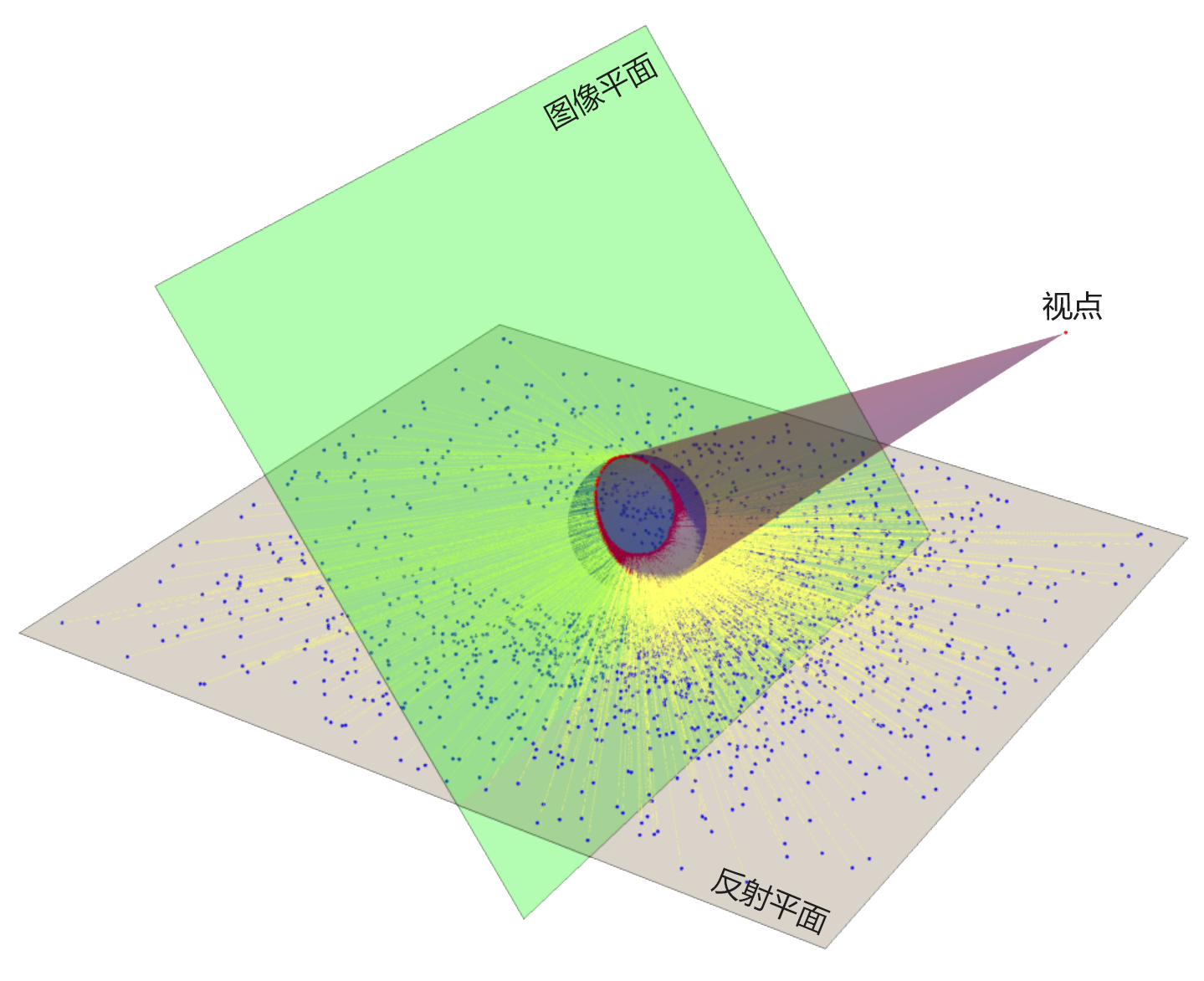
- 将二值图像转为“区域 – Region”,并提取边界坐标(这样做不但可以减少计算量,还可以输出矢量图)
- 将边界坐标三维化,并旋转到“图像平面”,并进行缩放(缩放需要计算很多点,但一般只计算一次即可)
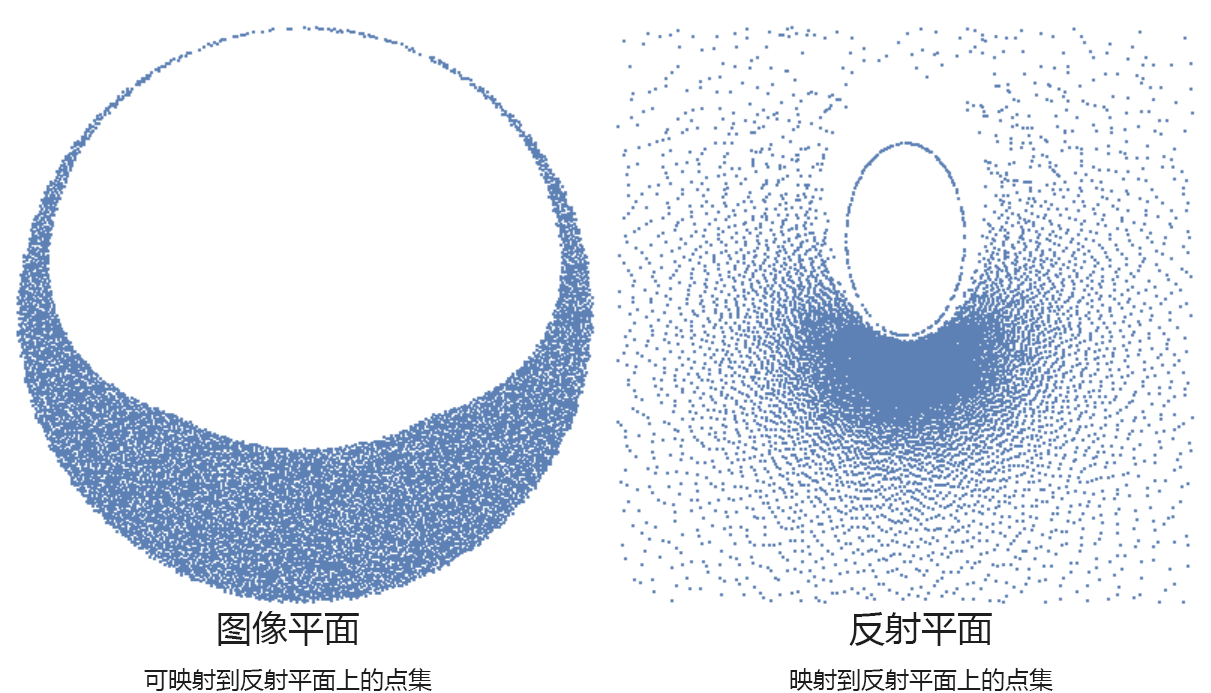
- 将图像平面上的坐标映射到反射平面
- 将坐标转换为“区域”,并绘图
2.2 缩放
(*================ 计算缩放 ================*)
{w, h} = Flatten[
Differences /@
CoordinateBounds@MeshCoordinates[regionImage]];(*输入图像内容的宽高*)
maxCellMeasure = 0.2;
imagePoints2D =
MeshCoordinates@
DiscretizeRegion[
Disk[{0, 0}, Sqrt[cSphereRadius^2 - Norm[imageCenter]^2]],
MaxCellMeasure -> {"Length" -> maxCellMeasure}];(*2维圆盘上的点*)
imagePoints3D =
RotationTransform[{{0.0, 0.0, 1.0},
cViewPoint}][#~Join~{Norm[imageCenter]} & /@
imagePoints2D];(*3维视觉平面上的点*)
pointsT = fViewPointToReflectPoint /@ imagePoints3D;(*3维反射平面上的点*)
pointsPairNew =
Select[pointsT, #[[2]] =!= None && #[[2]] \[Element] Reals &&
Max[Abs[#]] < 30 &];(*简单筛选*)
pointsImage2D = (RotationTransform[{cViewPoint, {.0, .0, 1.0}}]@
pointsPairNew[[;; , 1]])[[;; , ;; 2]];(*旋转回2维平面*)
yMax = Select[pointsImage2D, Abs[#[[1]]] < 0.1 && #[[2]] < 0 &][[;; ,
2]] // Max;
{xMax, yMin} =
SortBy[Select[pointsImage2D,
Abs[(#[[2]] - yMax)/#[[1]]] < h/(w/2) && #[[2]] < yMax &],
Last][[1]];
xMax = Abs[xMax];
imageNewRange = {{-xMax, xMax}, {yMin,
yMax}};(*将图像缩放到图像平面上的该区域:{{xMin,xMax},{yMin,yMax}},\[FilledSquare]\
\[FilledSquare]y可适当调大\[FilledSquare]\[FilledSquare]*)2.3 完整代码下载
版权说明
修改图中黄色方框中的文字,逐步运行即可生成自己想要的结果 ^_^